5.7 Drawing Free-Body Diagrams
Learning Objectives
By the end of this section, you will be able to:
- Explain the rules for drawing a free-body diagram
- Construct free-body diagrams for different situations
The first step in describing and analyzing most phenomena in physics involves the careful drawing of a free-body diagram. Free-body diagrams have been used in examples throughout this chapter. Remember that a free-body diagram must only include the external forces acting on the body of interest. Once we have drawn an accurate free-body diagram, we can apply Newton’s first law if the body is in equilibrium (balanced forces; that is, ) or Newton’s second law if the body is accelerating (unbalanced force; that is, ).
In Forces, we gave a brief problem-solving strategy to help you understand free-body diagrams. Here, we add some details to the strategy that will help you in constructing these diagrams.
Problem-Solving Strategy
Constructing Free-Body Diagrams
Observe the following rules when constructing a free-body diagram:
- Draw the object under consideration; it does not have to be artistic. At first, you may want to draw a circle around the object of interest to be sure you focus on labeling the forces acting on the object. If you are treating the object as a particle (no size or shape and no rotation), represent the object as a point. We often place this point at the origin of an xy-coordinate system.
- Include all forces that act on the object, representing these forces as vectors. Consider the types of forces described in Common Forces—normal force, friction, tension, and spring force—as well as weight and applied force. Do not include the net force on the object. With the exception of gravity, all of the forces we have discussed require direct contact with the object. However, forces that the object exerts on its environment must not be included. We never include both forces of an action-reaction pair.
- Convert the free-body diagram into a more detailed diagram showing the x- and y-components of a given force (this is often helpful when solving a problem using Newton’s first or second law). In this case, place a squiggly line through the original vector to show that it is no longer in play—it has been replaced by its x- and y-components.
- If there are two or more objects, or bodies, in the problem, draw a separate free-body diagram for each object.
Note: If there is acceleration, we do not directly include it in the free-body diagram; however, it may help to indicate acceleration outside the free-body diagram. You can label it in a different color to indicate that it is separate from the free-body diagram.
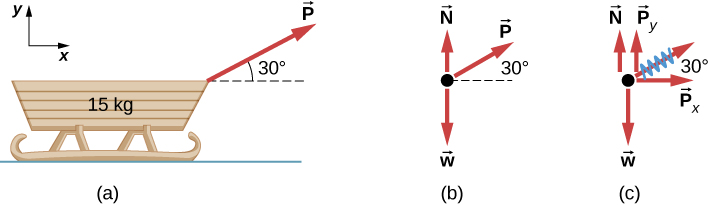
Let’s apply the problem-solving strategy in drawing a free-body diagram for a sled. In Figure 5.31(a), a sled is pulled by force P at an angle of . In part (b), we show a free-body diagram for this situation, as described by steps 1 and 2 of the problem-solving strategy. In part (c), we show all forces in terms of their x- and y-components, in keeping with step 3.
Example 5.14
Two Blocks on an Inclined Plane
Construct the free-body diagram for object A and object B in Figure 5.32.Strategy
We follow the four steps listed in the problem-solving strategy.Solution
We start by creating a diagram for the first object of interest. In Figure 5.32(a), object A is isolated (circled) and represented by a dot.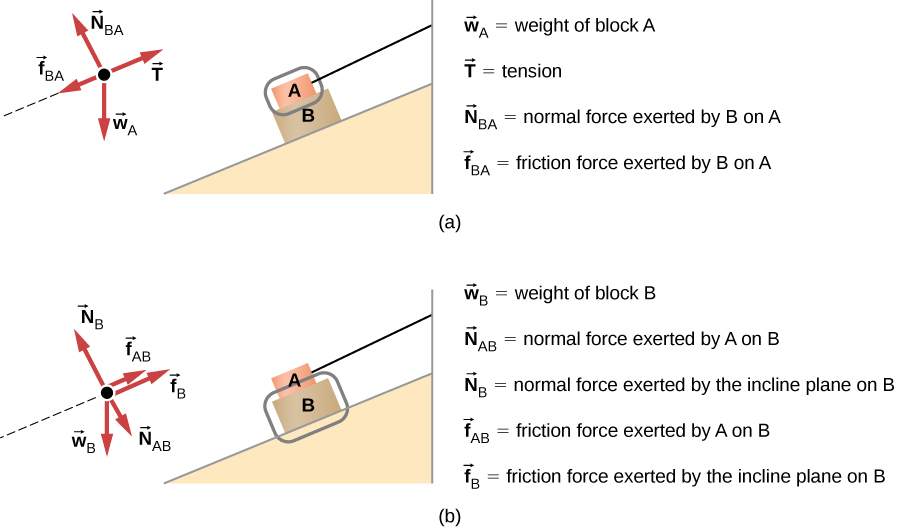
We now include any force that acts on the body. Here, no applied force is present. The weight of the object acts as a force pointing vertically downward, and the presence of the cord indicates a force of tension pointing away from the object. Object A has one interface and hence experiences a normal force, directed away from the interface. The source of this force is object B, and this normal force is labeled accordingly. Since object B has a tendency to slide down, object A has a tendency to slide up with respect to the interface, so the friction is directed downward parallel to the inclined plane.
As noted in step 4 of the problem-solving strategy, we then construct the free-body diagram in Figure 5.32(b) using the same approach. Object B experiences two normal forces and two friction forces due to the presence of two contact surfaces. The interface with the inclined plane exerts external forces of and , and the interface with object B exerts the normal force and friction ; is directed away from object B, and is opposing the tendency of the relative motion of object B with respect to object A.
Significance
The object under consideration in each part of this problem was circled in gray. When you are first learning how to draw free-body diagrams, you will find it helpful to circle the object before deciding what forces are acting on that particular object. This focuses your attention, preventing you from considering forces that are not acting on the body.Example 5.15
Two Blocks in Contact
A force is applied to two blocks in contact, as shown. Draw the reaction forces between the two blocks.Strategy
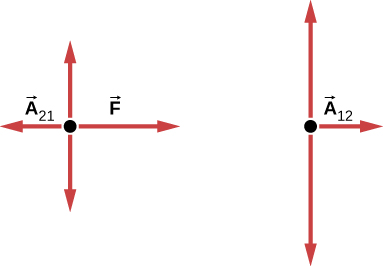
Draw a free-body diagram for each block. Be sure to consider Newton’s third law at the interface where the two blocks touch.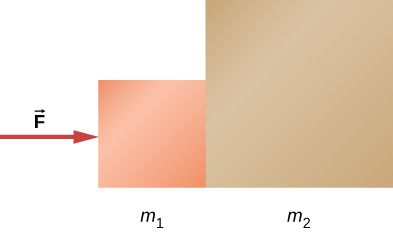
Solution
Significance
is the action force of block 2 on block 1. is the reaction force of block 1 on block 2. We use these free-body diagrams in Applications of Newton’s Laws.Example 5.16
Block on the Table (Coupled Blocks)
A block rests on the table, as shown. A light rope is attached to it and runs over a pulley. The other end of the rope is attached to a second block. The two blocks are said to be coupled. Block exerts a force due to its weight, which causes the system (two blocks and a string) to accelerate.Strategy
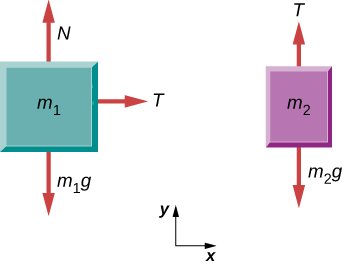
We assume that the string has no mass so that we do not have to consider it as a separate object. Draw a free-body diagram for each block.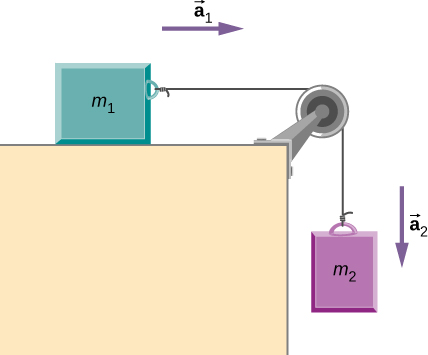
Solution
Significance
Each block accelerates (notice the labels shown for and ); however, assuming the string remains taut, the magnitudes of acceleration are equal. Thus, we have . If we were to continue solving the problem, we could simply call the acceleration . Also, we use two free-body diagrams because we are usually finding tension T, which may require us to use a system of two equations in this type of problem. The tension is the same on both .Check Your Understanding 5.10
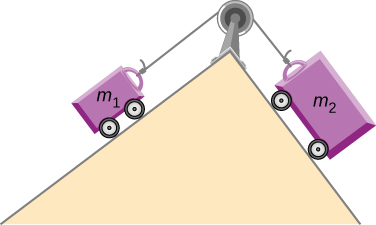
(a) Draw the free-body diagram for the situation shown. (b) Redraw it showing components; use x-axes parallel to the two ramps.
Numerical Methods Example
Now that we have explored different kinds of forces, let's see an example of how we could use computational methods to simulate a more realistic problem. Suppose we have an object that is experiencing a spring-like restoring force, and a friction force. For simplicity we will assume the equilibrium position of the spring-like force is at . To make it a little more realistic, we will use a friction force that depends on velocity. Not all friction forces we deal with work this way, but for the sake of this problem, this is the kind we will use at the moment.
Let the spring-like force be given by where 1 N/m. Notice that the direction of the force is opposite the direction of the displacement (as determined by the minus sign). Let the friction force be given by where 0.01 newton-seconds per meter. This friction force is opposite to the direction of motion (as described by the minus sign).
Suppose the object (with mass 10 grams) starts with an initial velocity of zero and an initial displacement of 20 centimeters. We wish to graph the position vs time function and be able to describe the motion. For this we will use our knowledge of forces to determine the acceleration. We will then use Euler's method to determine the position vs time function from the acceleration.
Using Newton's second law, we know that . Since we only have two forces, plugging both of them in gives us . To solve for acceleration, all we need to do is divide by the mass of the object. Now that we have acceleration, we can put it into our Euler's method code. However, notice that this acceleration depends on position and velocity rather than time, so we will need to make those the inputs of our acceleration function.
This system is called a dampened harmonic oscillator, and it shows up in all sorts of places in the real world. The spring-like force creates an oscillation motion, while the friction force creates dampening. You will likely explore this system more in your future. It is an important application of Newton's second law and of forces because it is so applicable. In many real world systems, we may either want to avoid/dampen as much as we can the oscillations that naturally occur, or allow them to happen. Understanding where it comes from is a crutial first step.
Interactive
Engage the simulation below to predict, qualitatively, how an external force will affect the speed and direction of an object’s motion. Explain the effects with the help of a free-body diagram. Use free-body diagrams to draw position, velocity, acceleration, and force graphs, and vice versa. Explain how the graphs relate to one another. Given a scenario or a graph, sketch all four graphs.